图为微型无线陆空两栖机器人
飞过石堆,穿过树枝,稳稳降落并行驶于地面……复杂户外环境下,一台体长9厘米、质量25克的微型无线陆空两栖机器人行动自如。
4月18日,清华大学航天航空学院、柔性电子技术国家级重点实验室张一慧教授课题组在《自然—机器智能》上以研究论文形式在线发表题为“具有连续三维变形和锁定能力的可重构机器”的研究成果。该课题组开发了几何形状可定制、具有连续变形和锁定特性的小尺度驱动器,并研制出目前已知世界上最小、最轻的微型无线陆空两栖机器人,以及可在“跑车”“飞车”“货车”多种构型间切换的多功能微型轮式机器人。
论文第一作者、清华大学航天航空学院博士研究生徐世威介绍,具有变形和锁定能力的驱动器如同微型机器人的外骨骼,使其拥有形态切换能力,以适应不同环境。然而,目前其他驱动器在小尺度下难以同时实现连续的形状变化与构型锁定,制约了多模式机器人向微型化与无线化发展。
对此,课题组采用材料与结构协同设计的策略,提出一种具有连续形状变化和构型锁定能力的新型薄膜形电热响应驱动器的设计概念。在不同的驱动电压下,驱动器可以变形并锁定在不同形态。在此基础上,受积木玩具启发,课题组提出一种“搭积木”似的构建方法,可以制备具有复杂重构能力的驱动器,如“变形金刚”。
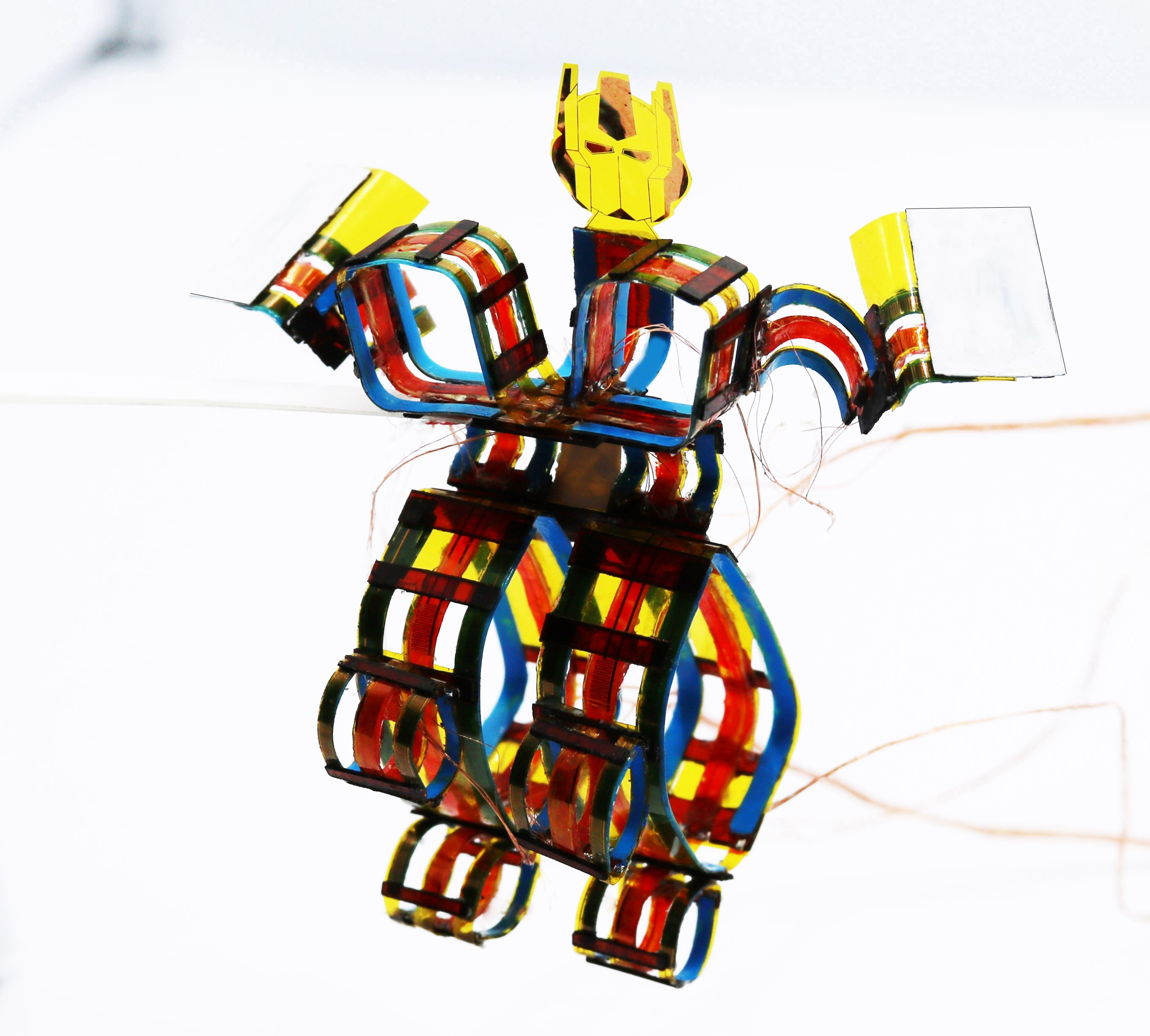
图为由多个驱动器单元构成的迷你版“变形金刚”
基于所开发的驱动器,课题组设计制备出一种微型无线陆空两栖机器人,能够在4种典型构型之间转变,进而以地面或空中运动模式在复杂室内及户外环境中运动。在地面运动模式下,机器人在多种材质上均具有较快的运动速度,最高可达每秒1.6米。此外,机器人构型切换的能耗较低,不超过所用电池容量的1.7%。
此外,课题组还将具有复杂变形模式的驱动器作为微型外骨骼,并集成微型电机等部件,设计制备了一款多功能微型轮式机器人。该机器人质量仅2.5克,能够在“跑车”“飞车”和“货车”等多种复杂构型间自由切换。
张一慧表示,此次成果为微型机器人研发应用提供了新的思路和路径。未来,微型无线陆空两栖机器人可应用于设备故障诊断及检修、地质及文物勘探等场景,替代人类执行复杂危险环境下的多种任务。此外,团队研制的驱动器可赋能生物电子器件,用于构建可展开的植入式医疗器械等。
来源:人民日报
编辑:陈晓芳 张兴红 贾春毅
一审:姜健 李敬友
二审:孙瑞永
三审:王桂林